
[2024-09] Cute Little Friend
Note: To protect commercial confidentiality, public information is limited.
Project Introduction
This was just an exploratory passion project - we built a “smart toy” that gives a physical robot some cool capabilities:
- Environmental awareness & understanding
- Personalized interactions with memory
- Behavioral control
What We Implemented:
Task Planning
Built upon our previous work to create a smarter task planner. Better tool selection = higher success rate (you get the idea) .Visual Q&A (VQA)
Added the ability to understand surroundings, and the information returned is important for further mission planning and tool selection.Memory System
Gave it basic memory that could scale to event recall. Enough to start doing some proactive planning.Framework Diagram:
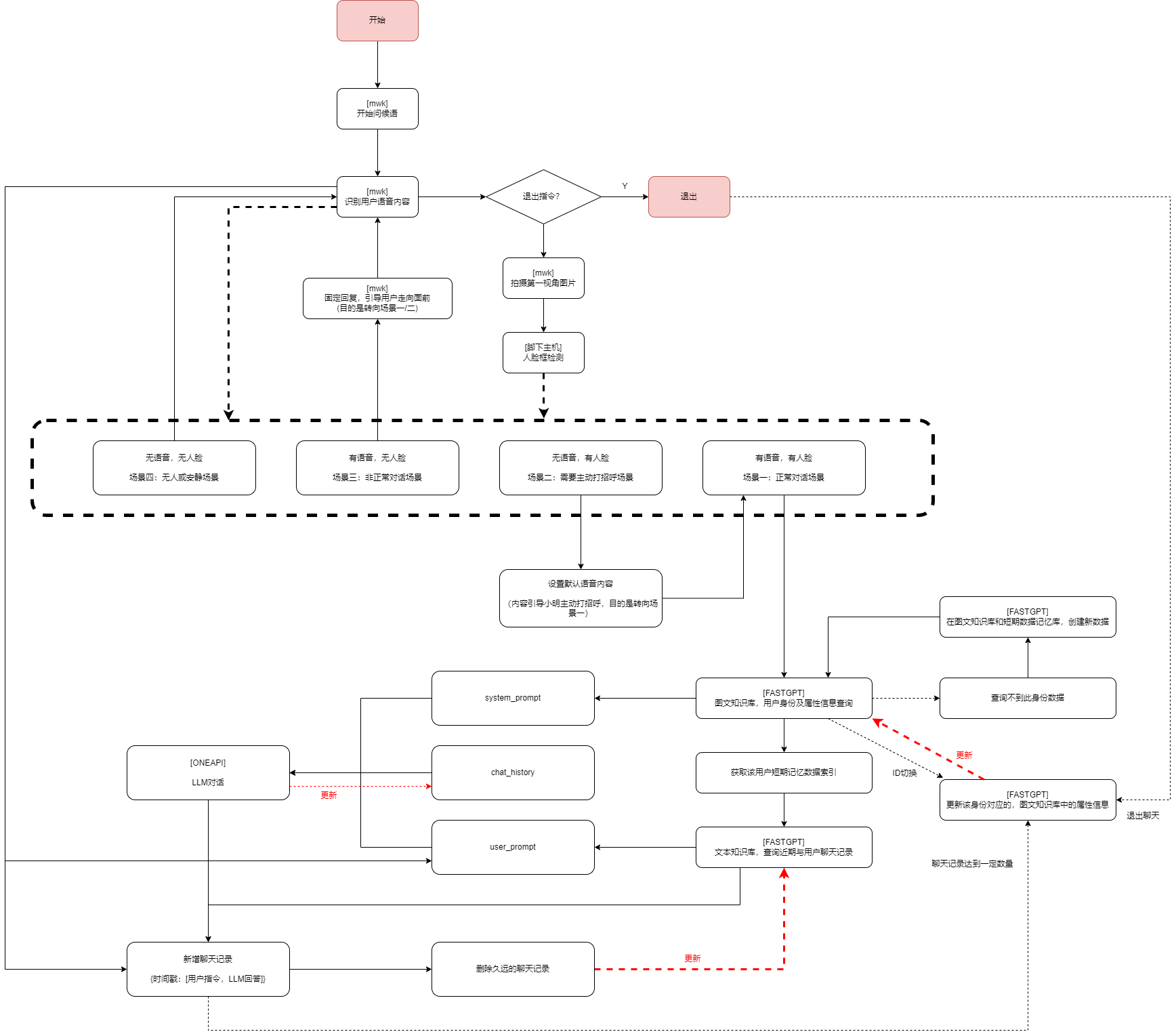
Other Stuff
All the usual suspects: Multimodal knowledge base, Safety Q&A, Motion control, Navigation, Personality customization…(Yeah, we reused a lot of existing components - no need to explain again)