
[2025-01] Motion Capture Teleoperation System
Note: To protect commercial confidentiality, public information is limited.
Project Overview
Developed as a key feature within the InternUtopia project, this system enables real-time teleoperation of a Franka robotic arm through monocular RGB camera-based hand gesture recognition, while simultaneously collecting trajectory data during operation.
Caption: Real-time gesture-to-arm motion mapping demonstration
Caption: Useful tools in system
Key Objectives:
- Low-cost solution for collecting robotic arm trajectory data in complex or long-horizion tasks
Highlights:
- Cost-effective: Requires only a single RGB camera without additional hardware
- Intuitive Controls: Special gestures enable:
• Third-person view adjustment
• Coordinate system recalibration
• Motion precision tuning - Optimized Performance: Human-robot motion semantic consistency with enhanced precision and real-time responsiveness
Technical Documentation provides detailed setup instructions and gesture lexicon. Below is a system architecture overview:
Hardware Requirements
Recommended:
- 2× (≥)NVIDIA RTX 4060 Ti GPUs (1 for Hamer, 1 for GRUtopia)
- 1× RGB camera (USB webcam or built-in laptop camera)
Note:
- Single-GPU operation possible with reduced frame rate
- Camera specifications are flexible
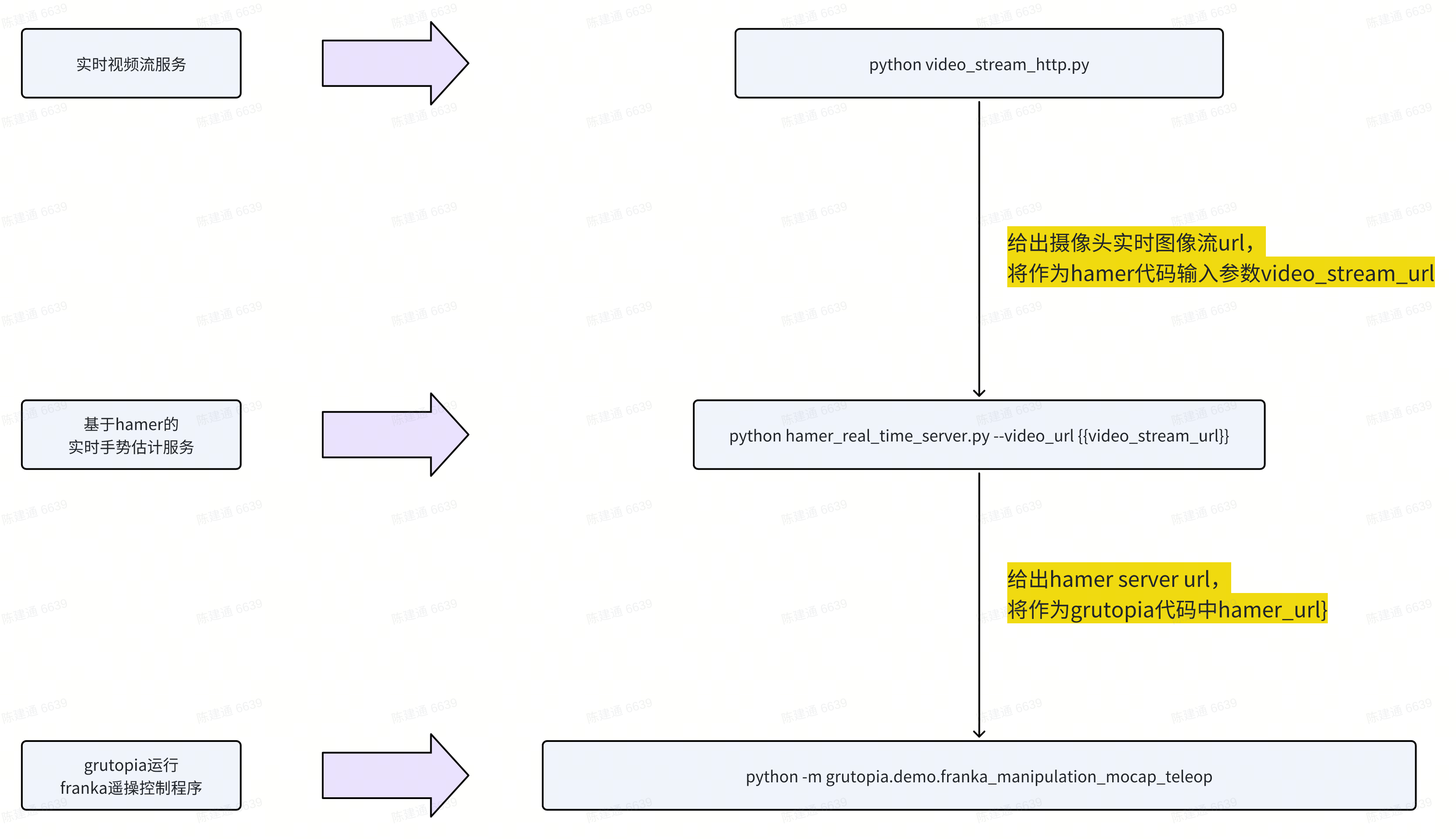
Implementation Workflow
- Launch real-time video streaming server
- Initialize hand gesture recognition service
- Start Franka control program
Gesture Lexicon
- Right Hand: Directly controls end-effector
- Thumb-index pinch: Close gripper
- Pinch release: Open gripper
- Left Hand: Auxiliary functions
- Thumb-index pinch: Adjust third-person view
- (See documentation for complete gesture library)