[2025-11] InternManip-Eval: A universal, easy-to-use, and efficient framework for embodied-manipulation tasks across diverse benchmarks.
Note: To protect commercial confidentiality, public information is limited.
Project Overview
Project address: InternManip-Eval
This is the clean, evaluation-only version extracted from the InternManip project, which was refactored by an individual.
A universal, easy-to-use, and efficient evaluation framework, designed for embodied manipulation tasks across various benchmarks. It currently supports the Calvin, SimplerEnv, and GenManip benchmarks, and also includes ARX LIFT2 real-robot control (from the IROS offline competition, though the prerequisite robot service launch code is not included).
🏠 Highlights
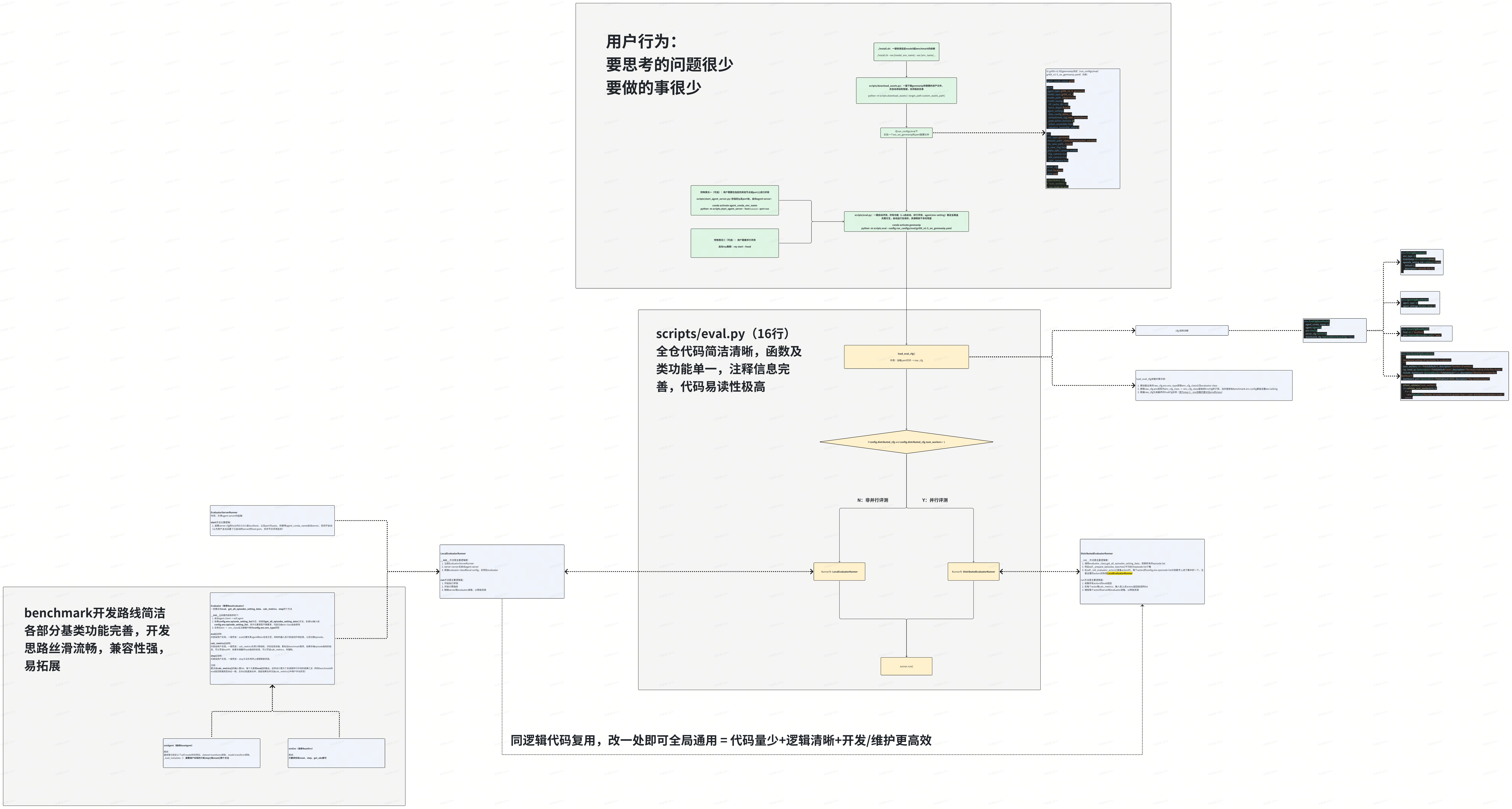
Unified
- Evaluations for different benchmarks are integrated into a single framework, and it is easy to extend with additional ones.
Easy to Use
- All evaluation settings are consolidated into one configuration file.
- One-command Python dependency installation.
- C-S(client–server) evaluation structure that decouples the agent from the environment, allowing each to use its own dependencies. Don’t be intimidated by the C-S setup——codebase supports automatic c–s evaluation launch, while also allowing manual launch (useful when deploying the agent on different nodes or when specifying a custom port for the agent server).
Efficient
- Supports distributed evaluation acceleration (and again, users don’t need to worry about the underlying implementation).
Framework